
子模块二 ARPA系统的组成及分类
学习目标:掌握ARPA系统的组成;
ARPA自动避碰流程;
掌握ARPA系统的分类。
重点难点:ARPA自动避碰流程。
一、ARPA系统的组成
一个基本的ARPA系统组成框图如图5-5所示。
由图5-5可见,ARPA系统由传感器和ARPA部件两大部分组成,其中各部分的作用如下。
(一)传感器
为ARPA提供各种传感信息,主要包括:船用雷达、陀螺罗经、计程仪。传感器为ARPA提供标绘信息数据,外存储器为可选配置。
1. X或S波段高质量船用雷达
为ARPA提供目标回波原始视频、触发脉冲、天线旋转方位信号与船首信号,以使ARPA计算机、显示器与雷达保持时间上严格同步。
2. 陀螺罗经
为ARPA提供本船航向信号。
3. 船舶计程仪
为ARPA提供两种本船航速信号,对水航速和对地航速。
4. 外存储器(可选配置)
如磁带、磁盘、光盘等,为ARPA提供港口视频地图、重要水域电子海图存储介质,供船舶进出港口等导航使用。
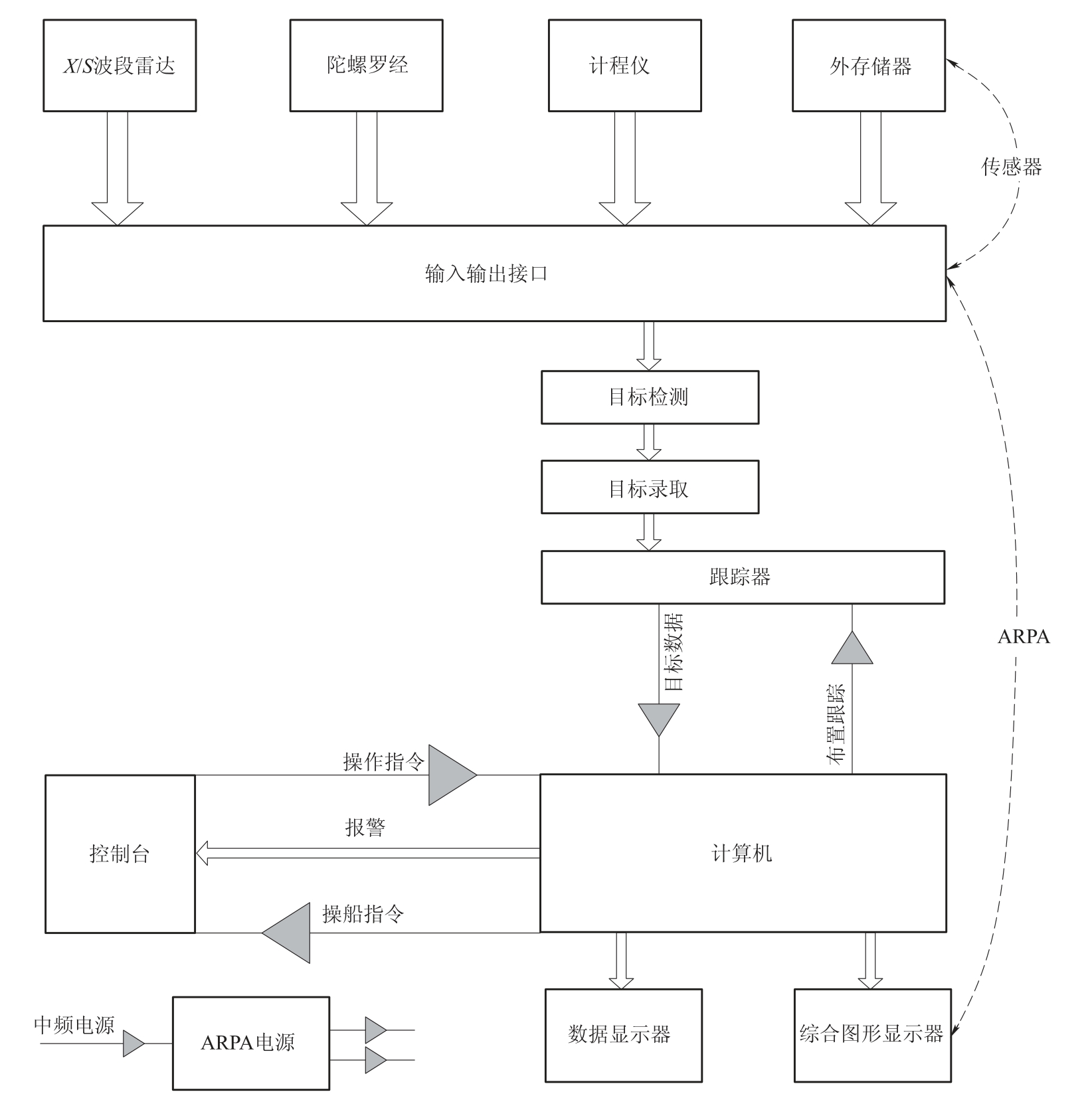
图5-5 ARPA系统的组成
(二)ARPA部件
ARPA部件包括:原始视频信号预处理电路、接口电路、目标检测电路、目标录取电路、跟踪器电路、电子计算机、显示器、控制台及电源,其作用分述如下。
1. 预处理电路
对雷达原始视频进行杂波处理及模/数变换(亦称“量化”),尽可能降低杂波并转换成计算机可识别的数字信号。
2. 接口电路
将输入ARPA的各种传感器的模拟信号转换成计算机可识别的数字信号。
3. 目标检测电路
对预处理后的回波信号进行自动检测,凡满足目标存在判定条件者则在相应的存储单元内存入数字信号“1”。
4. 目标录取电路
通过人工或自动方式将所选目标位置数据送入跟踪器,作为设置跟踪窗的初始数据。
5. 跟踪器电路
用于对已被录取目标进行自动跟踪并进行自动标绘,以获取目标的运动轨迹。
6. 电子计算机
电子计算机是ARPA的核心,包括主处理器、存储器(RAM、ROM)、接口、键盘、显示终端及电源等部件,用于控制自动录取,自动跟踪,自动计算目标的航速、航向、CPA、TCPA等,自动判断有无碰撞危险,完成各种自动计算与自动标绘任务。
7. 显示器
显示器包括平面位置综合图形显示器(Plan Position Indicator,PPI)和数据显示器。PPI显示目标回波数字视频或原始视频、本船及目标运动矢量、图形、字符;数据显示器显示本船及目标航行与碰撞数据。数据显示器可以单设,也可与图形显示器合而为一。
8. 控制台
控制台包括PPI及数据显示器的控制器。通过控制台上的操纵杆(Joystick)或跟踪球(Track-ball)及其键、钮的操作,将信息送入电子计算机,同时接收来自电子计算机的各种报警信息及操船指令。
9. 电源
将雷达中频电源变成ARPA计算机及其他电路所需要的各种电源。
从图5-5可见,通过I/O接口电路将各传感器和ARPA构成一个基本的ARPA系统。若将雷达和ARPA作为一个整体看,则ARPA可看成是一种带电子计算机的高级的雷达分显示器。若将ARPA视为主体,则雷达可看成是ARPA的一个传感器。
想一想
ARPA有哪些输入和输出信息?
二、ARPA自动避碰流程
整个ARPA系统由计算机控制,对由驾驶员或者自动录取的目标进行跟踪,并自动计算目标的各种航行和碰撞参数,如果碰撞参数超过了设定的安全值限界,则发出警报。目标回波的信息在显示屏上显示,驾驶员可以对其进行分析,判断有无碰撞危险以及紧迫程度,同时可运用试操船功能,找出或验证安全航向或安全航速,根据避碰规则决定本船应采取的避让措施。
ARPA自动避碰流程图如图5-6所示。
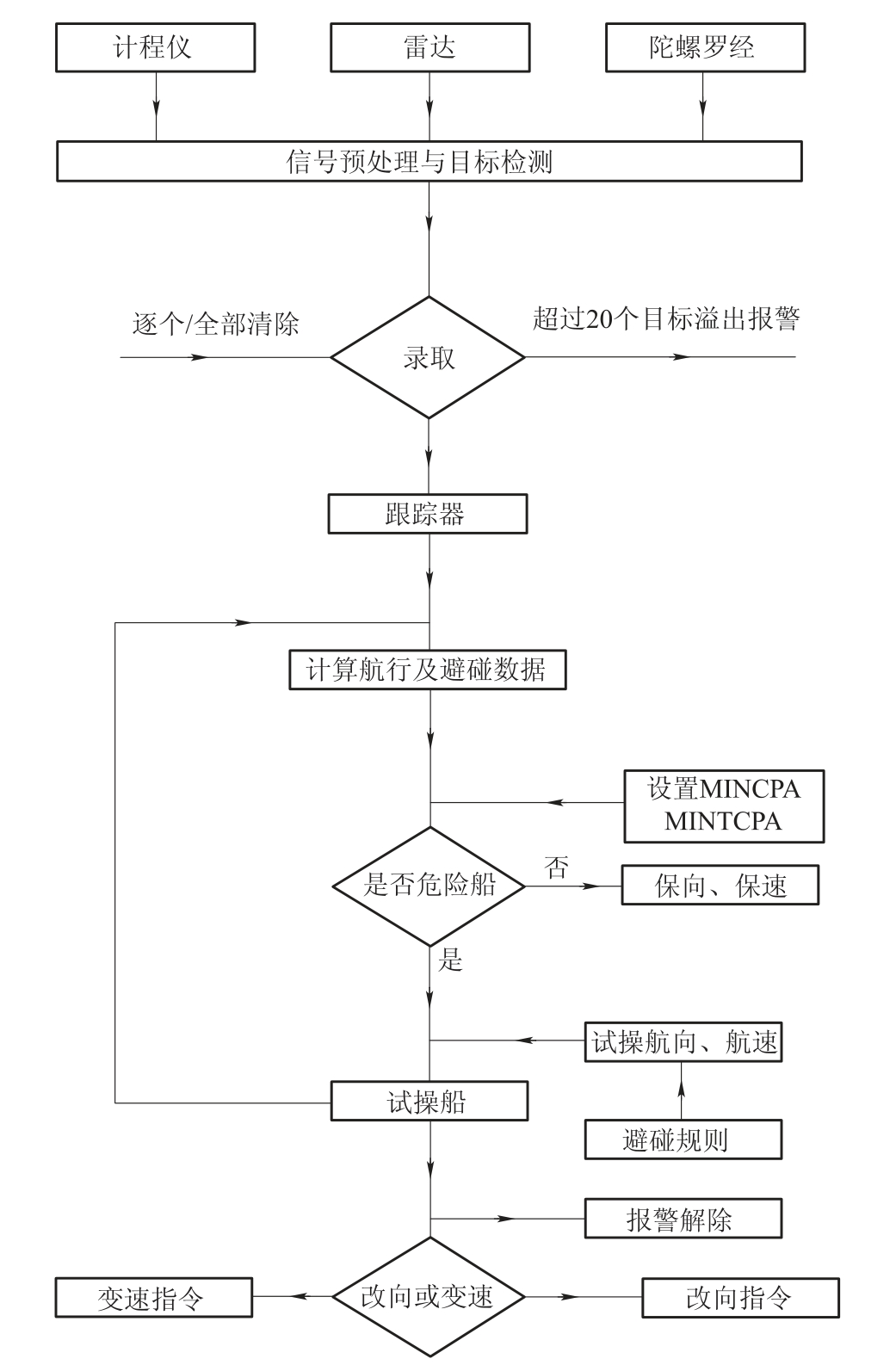
图5-6 ARPA自动避碰流程图
三、ARPA系统分类
(一)按系统组合方式分类
1. 分立式ARPA系统
其特点是主雷达显示器和ARPA显示器分开。ARPA图像可随时和雷达图像进行对照观测与分析,但是设备多、价格贵。如图5-7所示为分立式ARPA系统。
2. 组合式ARPA系统
其主雷达显示器与ARPA显示器合二为一、设备少、价格低,为目前大多数ARPA所采用。但缺点是一旦综合图形显示器出现故障,雷达图像也就无法看到,如图5-8所示。
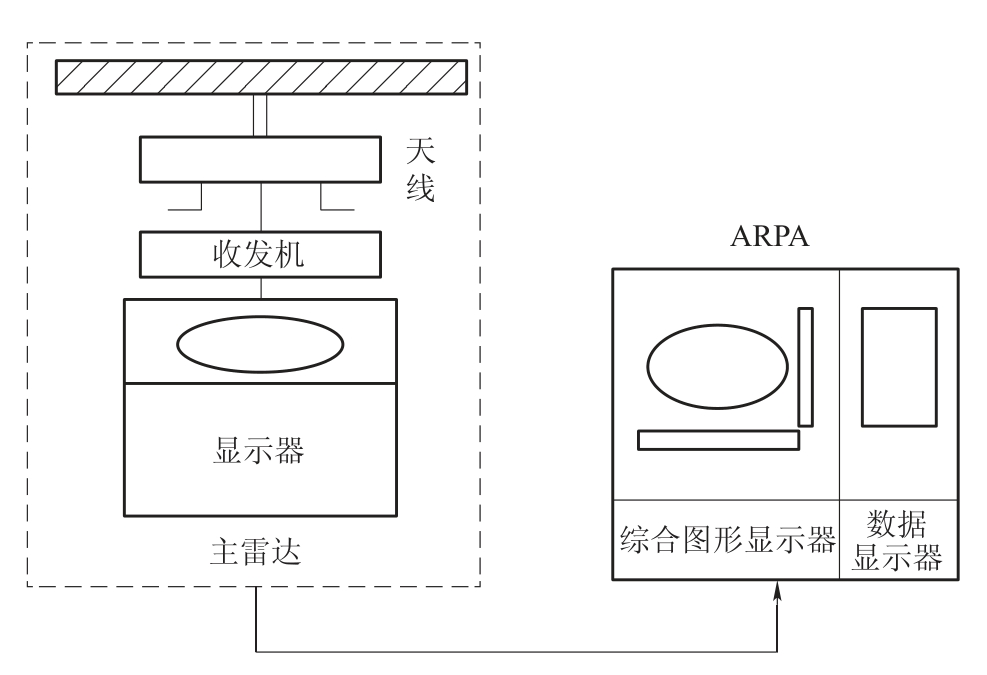
图5-7 分立式ARPA系统
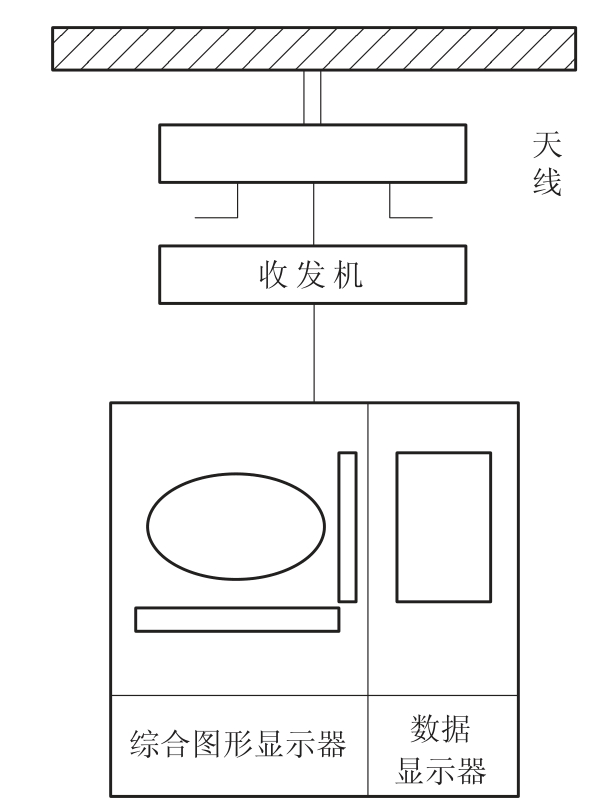
图5-8 组合式ARPA系统
(二)按显示目标动态方式分类
1. 矢量型ARPA
用矢量表示被跟踪目标的动态,包括现位置(矢量始端)、航向(矢量方向)、航速(矢量长度/矢量时间)、预测位置(矢量末端)等,有真矢量和相对矢量供选择。其特点是综合显示画面较清晰,为目前绝大多数ARPA所采用。
2. 图示型ARPA
用矢量前方的六边形表示预测危险区(Predicted Area of Danger,PAD),也有真矢量、相对矢量供选用。目前只有SPERRY公司的ARPA采用。其特点是避碰应用直观、简便。
(三)按显示器扫描方式分类
1. 径向圆扫描式
沿用常规船用雷达的扫描方式,为现有多数ARPA所采用。
2. 电视光栅扫描式
近年来生产的ARPA采用的新型扫描方式,具有高亮度、高分辨率的特点,为第三代彩色ARPA所采用。
练一练
画出ARPA系统框图并说明其工作过程。
资料卡
光栅扫描系统
具有光栅扫描系统的显示器,在该扫描系统中,套在显像管管颈上的偏转线圈由固定放置的一组水平偏转线圈和一组垂直偏转线圈组成。在水平偏转线圈中流过快速变化的线性锯齿电流时,在荧光屏上将产生水平扫描,又称行扫描;在垂直偏转线圈中流过慢速变化的线性锯齿电流时,在荧光屏上将产生垂直扫描,又称帧扫描。当水平偏转线圈和垂直偏转线圈中同时流过相应的锯齿电流时,则在荧光屏上将产生从上而下、从左到右的逐行的扫描,称为光栅扫描。
思考与训练
1. ARPA的PPI之所以能实现高亮度显示是因为________。
A. 加快径向扫描速率 B. 加快天线旋转速度
C. 采用非实时扫描方式 D. 提高了雷达的分辨力
2. ARPA系统中输入接口的主要用途是________。
A. 放大传感器信号的幅度
B. 使输入到ARPA的各种传感器信号极性合适
C. 使各传感器模拟信号变成计算机可接受的数字信号
D. 使各传感器模拟信号匹配
3. 本船计程仪有故障时,则________。
A. ARPA照常可使用
B. 雷达不能使用
C. 雷达照常可使用,但ARPA不能使用
D. 雷达和ARDA都不能使用
4. 对输入ARPA的原始视频信号预处理包括________。
A. 抑制杂波和信号量化 B. 对原始信号进行放大
C. A、B都对 D. A、B都错
5. 现在大多ARPA都采用________。
A. 实时显示 B. 非实时显示
C. 由操作者按需选择 D. 由用户在购置时指定
6. ARPA对传感器原始信号进行预处理的目的是________。
A. 视频信号量化,抑制杂波 B. 罗经信号数字化
C. 计程仪信号数字化 D. A、B、C
7. ARPA的传感器包括:________。
A. 高质量船用雷达 B. 电罗经
C. 速度计程仪 D. 以上各项
上一篇:空调机位尺寸有标准吗
下一篇:枚举法(穷举法)






