
2.2.1 惯性坐标系到非惯性坐标系的转换
前面介绍了地心惯性坐标系,考虑GPS在导航中的普遍应用,下面介绍地心坐标系和WGS-84坐标系。
地心坐标系以地球质心为坐标原点,要求椭球中心与地心重合。最典型的地心坐标系为目前采用比较多的WGS-84椭球坐标系,也是匹配导航中背景场所采用的坐标系统。
美国国防部1984世界大地坐标系WGS-84是一个协议地球参考系CTS(conventional terrestrial system)。该坐标系的原点是地球的质心,z轴指向BIH1984.0定义的协议地球极CTP(conventional terrestrial pole)方向。x轴指向BIH1984.0零度子午面和CTP赤道的交点,y轴和z轴、x轴构成右手坐标系。
WGS-84椭球采用国际大地测量与地球物理联合会第17届大会大地测量常数推荐值。采用的四个基本参数是长半轴a= 6378137m,地球引力常数(含大气层)GM= 3986005×108m3 s-2,正常化二阶带球谐系数C2,0=-484.16685×10-6,地球自转角速度ω=7292115×10-11 rad/s。根据以上四个参数可以进一步求得地球扁率a=0.00335281066474m;第一偏心率平方e2= 0.0066943799013和第二偏心率平方e'2= 0.00673949674227。
为实现惯性空间直角坐标系和WGS-84空间直角坐标系统的相互转换,下面给出两个空间直角坐标系统间的转化方法。
设两个空间直角坐标分别为O-xyz和O'-x'y'z',它们的坐标原点不一致,即存在三个平移参数(Δx,Δy,Δz),表示两个坐标系在三个坐标轴上的平移量;一般情况下,两个坐标系的坐标轴并不平行,存在三个旋转参数(εx,εy,εz),为三维空间直角坐标间变换的三个旋转角,即欧拉角,对应的旋转矩阵为:
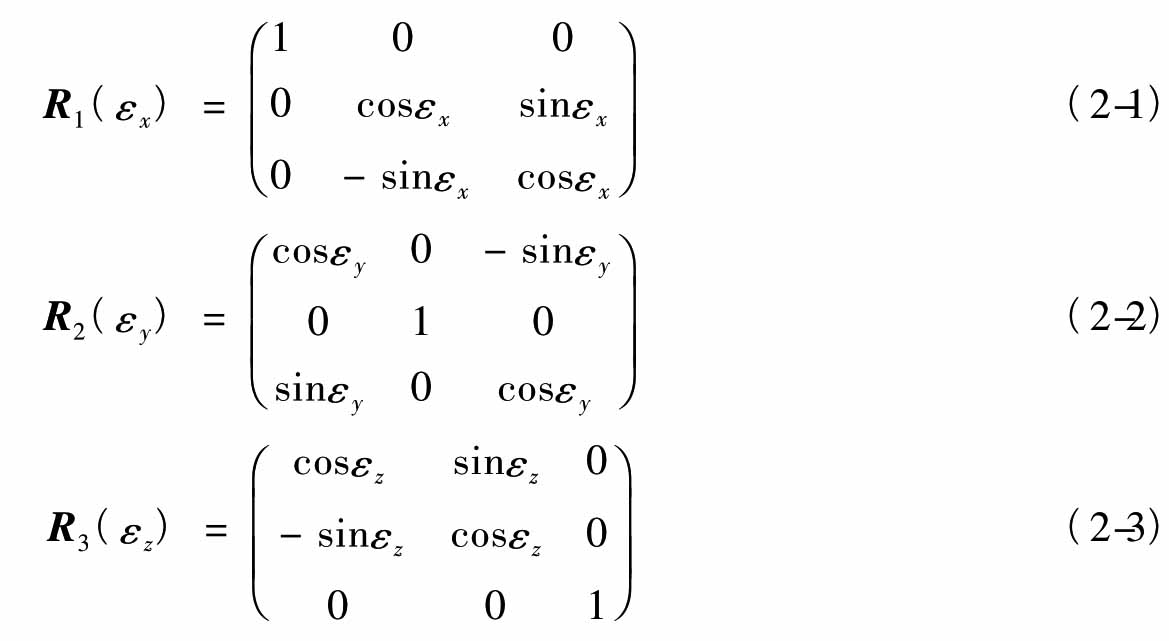
![]()
一般情况下,εx,εy,εz为微小转角,可取

因此,R0可以简化为:
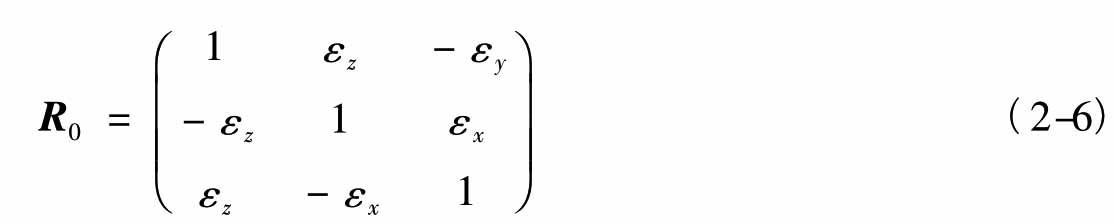
式(2-6)也称为微分旋转矩阵。
O'-x'y'z'中坐标(x',y',z')转换到O-xyz中坐标(x,y,z)时,转换模型为:

式中Δx,Δy,Δz为三个平移参数,εx,εy,εz为三个旋转参数,m为尺度变化参数。






